ドライバ分離型多軸モーターコントローラ / ARIES / LYNX

- Motionnet®を採用、32軸の制御が可能。
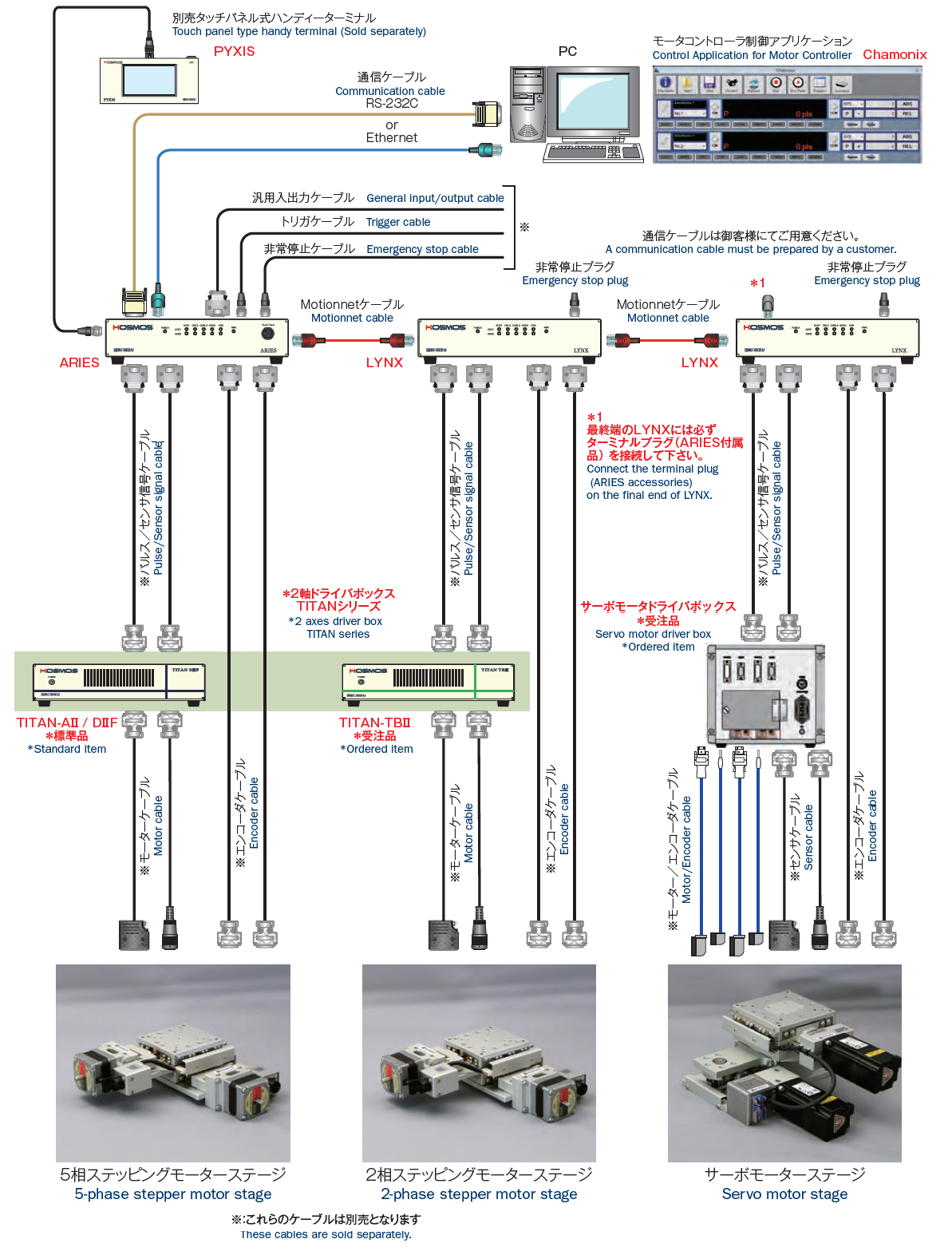
ARIES(アリエス)2軸マスターモーターコントローラ1台に対して、 LYNX(リンクス)2軸スレーブモーターコントローラを、15台接続することで最大32軸制御が可能となります。
- 様々なモータードライバに接続可能
従来のドライバ内蔵型からドライバ分離型とすることで、以下の様なモータードライバに接続可能です.
・5相ステッピングモータードライバ ・2相ステッピングモータードライバ ・サーボモータードライバ(パルス制御型) ・ピエゾステージドライバ ケーブル接続で簡単にシステムアップが可能なドライバボックス「TITAN(タイタン)」シリーズをご用意しています。
例)5相ステッピングモーター用
2軸 ACドライバ ボックス⇒ TITAN-AⅡ
2軸 DCドライバ ボックス⇒ TITAN-DⅡF
- EMCを考慮した設計
コネクタを全て金属製とし、EMC対策を強化しました。
- SCシリーズ(旧コントローラ)の機能を継承
多軸同時駆動(最大4軸) 直線補間駆動(最大3軸) 繰り返し往復駆動 バックラッシュ補正 駆動エンコーダカウント&フィードバック制御 トリガ出力 - 新たに追加された機能
ソフトリミット サーボ制御(パルス制御型) 汎用I/O(入出力各8点)※1 非常停止入出力 制御アプリケーション【Chamonix】対応(Windowsアプリケーション) RS-232C、Ethernet通信に対応 オプション【PYXIS】にてタッチパネルでの制御が可能です。 ※1.入出力のステータスはリモートコントロールにて取得できます。
Motionnet® は日本パルスモータ株式会社の登録商標です。
ご注意:付属の電源ケーブルは、日本国内の仕様です。電圧により規格が異なりますので、必要に応じてお客様にてご準備ください。(~125V)
ARIES / LYNX システム構成例
| 型式 | 製品 | 特徴 | 価格 | 数量 | 見積り |
ARIES |
ステッピングモーター コントローラ |
マスター コントローラ |
¥165,000 | ||
| LYNX (リンクス) |
ステッピングモーター コントローラ |
スレーブ コントローラ |
¥105,000 | ||
| TITAN-AⅡ (タイタン) |
2軸 |
ACドライバ | ¥141,000 | ||
| TITAN-DⅡF (タイタン) |
2軸 |
DCドライバ | ¥97,000 | ||
| PYXIS (ピクシス) |
ARIES専用 |
PC接続不要で 操作可能 |
¥99,000 |
ドライバーボックス接続ケーブル(ARIES/LYNX↔TITAN)
コントローラーユニット(ARIES、LYNX)とドライバーボックス(TITAN)を接続するためのケーブルです。
| 型式 | 品名 | 価格 | 数量 | 見積り |
| CPS005 | パルス/センサー信号ケーブル 0.5m | 8,000 | ||
| CPS010 | パルス/センサー信号ケーブル 1.0m |
8,000 | ||
| CPS015 | パルス/センサー信号ケーブル 1.5m | 8,000 | ||
| CPS020 | パルス/センサー信号ケーブル 2.0m | 8,000 |
別売りオプション
ARIES専用タッチパネル式ハンディーターミナル PYXIS(ピクシス)
| 「PYXIS(ピクシス)」を接続することで、PCに接続せずに以下の動作が可能です。 | ||||
 |
 |
|
||
ARIES / LYNX 仕様
一般仕様
| 型式 | ARIES(アリエス) | LYNX(リンクス) |
| 外観 |  |  |
| 製 品 | ステッピングモーターコントローラ (マスターコントローラ) | ステッピングモーターコントローラ (スレーブコントローラ) |
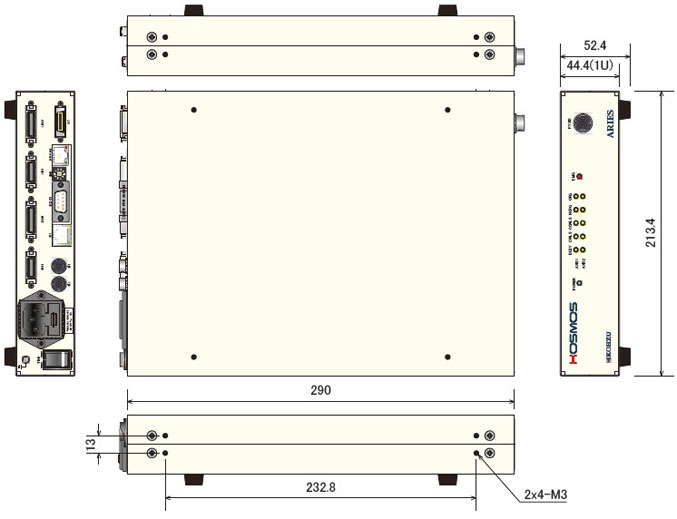
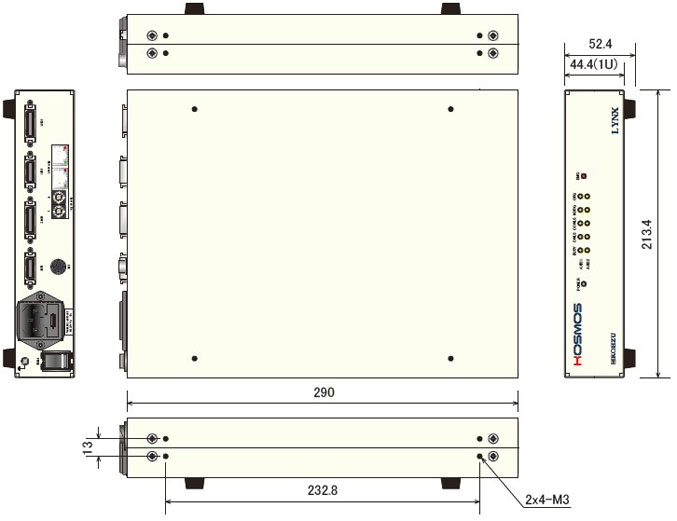
| 筐体サイズ | H52.4×W213.4×D290 | |
| リンク制御方式 | Motionnet | |
| 制御軸数 | 最大32軸(ARIES1台で2軸、LYNX15台増設で30軸) | |
| 消費電力 | 35VA MAX (AC100V供給時) | 25VA MAX (AC100V供給時) |
| 使用環境 | 動作温度0~40℃、動作湿度30~85%(結露無きこと) | |
| 表示モニタ | センサ状態、BUSY状態、非常停止状態LED | |
| 入力電源 | AC90~240V、50/60Hz | |
| 重量(kg) | 1.45 | 1.25 |
機能仕様
| 型式 | ARIES(アリエス) | LYNX(リンクス) |
| 駆動機能 | 各軸独立駆動、多軸同時駆動(最大4軸)、直線補間駆動(最大3軸)、 繰り返し往復駆動、バックラッシュ補正駆動、クローズドループ制御等 | |
| 速度制御 | 10種類の速度テーブル | |
| 駆動方式 | 矩形駆動、台形駆動(非対称可)、S字駆動(非対称可) | |
| 設定移動量 | -134,217,728~+134,217,727pulse | |
| 駆動周波数 | 1pps~5Mpps | |
| 原点復帰方式 | 15種類(ORG、NORG、CWリミット、CCWリミット、Z相の組合せ) | |
| 出力信号 | ・ CW方向パルス、CCW方向パルス、カレントOFF信号、トリガ信号 (差動信号出力) ・ サーボON信号、アラームリセット信号、汎用出力信号 | |
| 入力信号 | ・ センサ信号(CWリミット、CCWリミット、NORG(原点近傍)、ORG (原点))(12Vプルアップのフォトカプラ入力) ・ サーボ用信号(アラーム、サーボレディ、インポジション)、汎用入 力信号、非常停止信号(24Vプルアップのフォトカプラ入力) ・ エンコーダ信号(A相、B相、Z相)(差動信号入力) | |
| トリガ機能 (1、2軸目のみ) | ・ 駆動パルス同期信号(1〜100,000まで間引き設定可能) ・ エンコーダ同期信号(1〜100,000まで間引き設定可能) ・ BUSY信号(駆動パルス出力中を示す信号) ・ 定速信号 ・ 駆動開始時&終了時にワンショット出力 ・ コマンドによるタイミングでのワンショット出力 | |
| 通信インターフェース | RS-232C、Ethernet(TCP-IP) | |
| 付属品 | CD-ROM(Chamonix、USBデバイスドライバ、取扱説明書等) 電源ケーブル(2m)、非常停止ショートプラグ | |
| オプション | PYXIS(ARIES専用 タッチパネル式 外付け操作BOX 価格 ¥90,000) | |
| 搭載ドライバ仕様 | 下段TITAN-AⅡ/DⅡを参照 | |
TITAN-AⅡ/DⅡF 仕様一覧
一般仕様
| 型式 | TITAN-AⅡ(タイタン) | TITAN-DⅡF(タイタン) |
| 外観 |  |  |
| 製 品 | 2軸 5相ステッピングモータードライバBOX | |
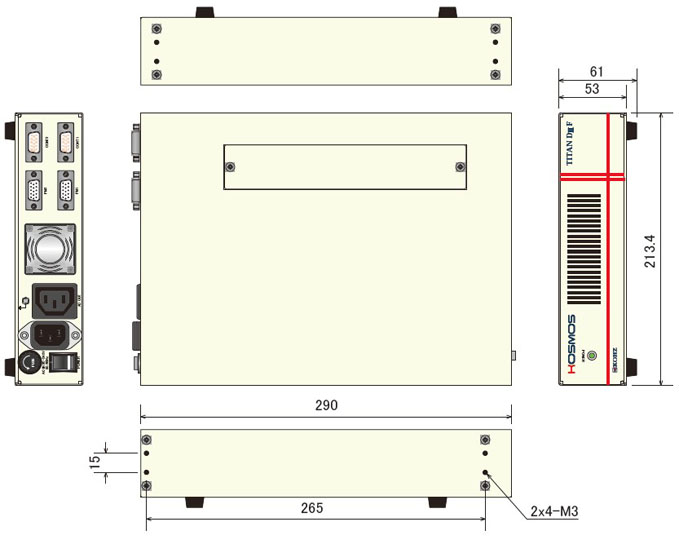
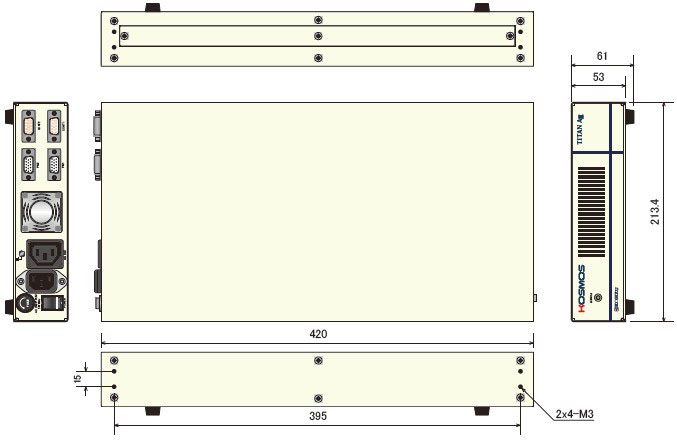
| 筐体サイズ | H61×W213.4×D420 | H61×W213.4×D290 |
| 駆動軸数 | 2軸 | |
| 消費電力 | 430VA | 160VA |
| 使用環境 | 動作温度0〜40℃、動作湿度30~85%(結露なきこと) | |
| 入力電源 | AC90~240V、50/60Hz | |
| 重量(kg) | 3.9 | 2.1 |
搭載ドライバ仕様
| 型式 | TITAN-AⅡ(タイタン) | TITAN-DⅡF(タイタン) |
| ドライバ型式 | MD-551E(ACドライバ)x2 | MD-255F(DCドライバ) |
| 駆動モータ | 5相ステッピングモーター | |
| 駆動方式 | バイポーラ定電流、新ペンタゴン結線 | |
| 駆動電流 | 0.35A/相〜1.48A/相の16種類から選択可 (ロータリスイッチで設定) | 0.35A/相,0.75A/相,1.4A/相の3種類 (ディップスイッチ切替) |
| 最大応答周波数 | 500kpps | |
| マイクロステップ分割数 | ・ 種 類: 1,2,4,5,8,10,16,20,25,40,50,80,100,125,200,250の16種類 ・ 設定方法:※1 | 30種類、ロータリスイッチ設定 機能切替スイッチ2,3シリーズ切替 2series:1,2,4,5,8,10,20,40,80,16,25,50,100,125,200,250 3series:1,2,3,6,12,18,24,32,36,48,60,72,120,160,180,240 |
| その他機能 | 励磁OFF、STOP電流調整等 | |
| 付属品 | 電源ケーブル 本体用2m ARIES/LYNX用供給電源ケーブル0.5m | |
| ※1. TITAN-AⅡ内蔵のモータードライバはロータリスイッチM1,M2によりマイクロステップ分割数を2つ設定することができます。 上位側コントローラ(ARIES等)からの制御により、どちらの設定を有効とするかを選択することができます。 |
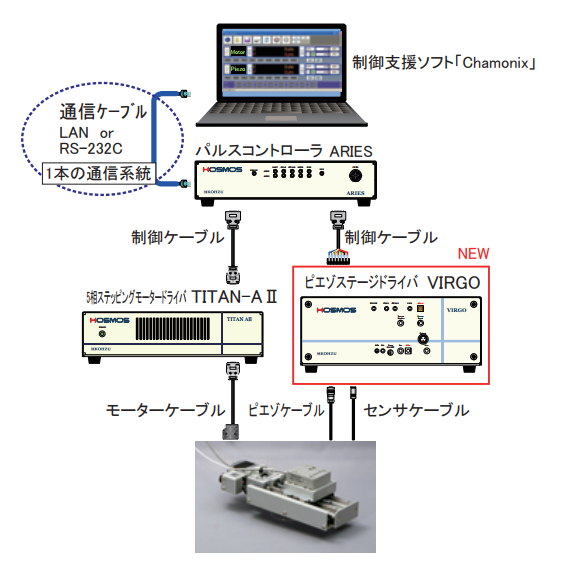
ピエゾステージドライバ VIRGO(バーゴ)
| 型式 | VIRGO(バーゴ) |
| 外観 | .jpg) |
| 製 品 | ピエゾステージドライバ |
| 筐体サイズ | H89×W213.4×D420 |
| 駆動軸数 | 1軸 |
| 消費電力 | 50VA MAX(AC100V供給時) |
| 使用環境 | 動作温度0〜40℃、動作湿度30~80%(結露なきこと) |
| 入力電源 | AC90~240V、50/60Hz |
| 重量(kg) | 3.6 |
機能仕様
| 型式 | VIRGO(バーゴ) |
| 駆動機能 | CW/CCWパルス列入力をカウントし、その値(0~65,535)に 応じた電圧を出力してピエゾステージの位置決めを行います |
| 入力パルス周波数 | 最大10MHz |
| パルスカウント範囲 | -1~+65,536パルス(位置決めに使用する範囲は0~65,535) |
| センサアンプ部 | センサタイプ:静電容量型
センサ出力電圧:0V~+10V センサモニタ(Sensor Monitor) 出力インピーダンス:100Ω |
| PID制御部 | アナログ入力信号(ANin)
入力電圧:0V~+10V、入力インピーダンス:100kΩ 偏差出力信号(Err) 出力電圧:-10V~+10V、出力インピーダンス:100Ω |
| ドライバ部 | ピエゾ駆動信号(Output) 出力電圧:-20V~+150V、出力インピーダンス:約32Ω、 出力電流:60mA(平均) ,500mA(ピーク<6msec)、ドライバ増幅率:15倍 ドライバ出力リップルノイズ:1mVp-p(~100kHz帯域,容量性負荷5.4uF時) 保護回路:負荷ショート検出,過熱保護(内部温度70度以上) モニタ信号(Mon) 出力電圧:-1.33V~+10V、出力インピーダンス100Ω |
| その他出力信号 | リミット信号(CWLS,CCWLS) オープンコレクタ出力(絶対最大定格80V,30mA)
アナログ出力信号(ANout) 出力電圧:0V~+10V |
| 入力パルス信号 | CWパルス,CCWパルス信号: フォトカプラ入力,7.5~14mA |
| 表示モニタ | POWER ON/OFF状態、センサ(CWリミット,CCWリミット)状態、非常停止状態 |
VIRGO システム構成例
ARIES図面
LYNX図面
TITAN-AⅡ図面
TITAN-DⅡF図面