自動Zステージガイダンス
スペック表の見方
 |
| ZA07A-W2C02 |
| スペック表 | 説明 | ||
| 型式 | ZA07A-W2C02 | ① 型式の名称。 | |
| 勝手違い型式 | ZA07A-W2C02-R | ② 型式①に対する逆勝手仕様の型式です。 | |
| テーブル面 | 70mm×70mm | ③ ステージ上面の大きさ。 | |
| 案内方式 | 精度クロスローラガイド | ④ ステージの案内方式を示しています。 | |
| 移動範囲 | ±2.5mm | ⑤ 中心点を基準としてプラス、マイナスで表示します。 | |
| 送り方式 | 1/4-クサビ. ボールネジ, リード1.0mm | ⑥ ステージの送り方式とネジピッチです。 | |
| 分解能 | フル/ハーフ ステップ | 0.25μm/0.125μm | ⑦ マイクロステップ分割数の違いによる、ステージの各分解能です。 |
| マイクロステップ(1/20分割) | 0.0125μm | ||
| 最高速度 | 1.25mm/sec | ⑧ ステージが動作できる最高速度(ハーフステップ、10kpps時)です。 | |
| 繰り返し位置決め精度 | ≦±0.5μm | ⑨ 検査方法を参照して下さい。 | |
| ロストモーション | ≦0.3μm | ⑩ 検査方法を参照して下さい。 | |
| 垂直度 | ≦5μm/5mm | ⑪ ステージ下面に対するステージ上面の垂直度です。 | |
| 水平耐荷重 | 49N(5kgf) | ⑫ ステージ中央での搭載可能重量です。 | |
| 材質 | アルミ合金 | ⑬ 主に使用されている材料を示します。 | |
| 外観 | 白色仕上げ | ⑭ 外観の色や表面処理を示します。 | |
| 自重 | 1.15kg | ⑮ 製品の重量。 | |
| モータ | 5 相ステッピングモータ ( オリエンタルモーター:PK544PMB) 0.75A/相,基本ステップ角 0.36° | ⑯ 使用されているアクチュエータの型式を示します。 | |
| コネクタ | 丸形20ピン(ヒロセ: RP13A-12RA-20PC) | ⑰ ステージに使用されているコネクタの形状とピン数です。 | |
| ステージ結線タイプ | V3 | ⑱ ステージとステッピングモータ及び、フォトセンサとの結線形式です。 | |
| 価格 | ¥230,000 | ⑲ 標準製品の価格を示します。 | |
| オーバーホール費 ※ | ¥48,000 〜 | ⑳ オーバーホールの費用を示します。 | |
| クリーングリス交換費 | ¥36,000 | クリーングリスへの交換費用を示します。 | |
| 真空グリス交換費 | ¥36,000 | 真空グリスへの交換費用を示します。 | |
| 同形モータ交換費 | ¥12,000 〜 | 標準モータと取り付けサイズが同等のモータへの交換費用を示します。 | |
| 異形モータ交換費 | ¥30,000 〜 | 標準モータと取り付けサイズが異なるモータへの交換費用を示します。 | |
※ オーバーホール費に部品代は含まれません。
案内方式
●クロスローラガイド
| クロスローラガイドとは、90°のV溝を持つローラレースと円筒コロからなる案内方式です。ローラレースの摺動面は、焼入れ研磨仕上げにより平面度の精度が高く硬質に仕上げられています。円筒コロはこの2本のローラレースに挟まれた空間に互い違いに配置されています。ステージが駆動する際には、ローラレース上を複数の円筒コロが転がるため、停止時から起動時への摩擦の変化(静止摩擦と動摩擦の差)が小さく、作動すべりが起こりにくくなっています。また、クロスローラガイドは、線接触で荷重を支えるため、ボールガイド機構よりも剛性が高くなっています。このクロスローラガイドは、独自に設計された剛性が強く精度の高いものを使用し、ローラレースと円筒コロ間の与圧を精密に管理して高剛性を維持しています。 |
●クサビ型クロスローラガイド
| クサビ型クロスローラガイドとは、一組のクロスローラガイドは水平面に、もう一組は正接が1/4になるように(約14°)傾けて配置してあります(図-1参照)。片側からクサビを押し込むと、中心軸上に固定されたテーブルが上下動します。傾いたクロスローラガイドが水平方向成分の力を支えるため、テーブル上面のモーメント荷重剛性が強化されています(1/2タイプも同様です)。 | 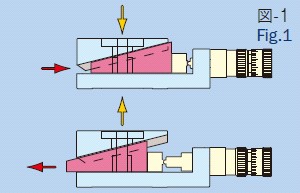 |
●四面フラットローラーガイド
| 四面フラットローラとは、移動柱の四方向に円筒コロを配置し、その外側を四枚のガイド板で構成する案内方式です。移動柱、ガイド板は焼き入れ研磨仕上げにより平面、直角の精度が高く、硬質に仕上げられています。クロスローラガイドと比べ円筒コロの長さ、数が多く接触面積が多い為、剛性が高く、姿勢安定性に優れた構造です。 |
送り方式
●研削ネジ、ボールネジ+タイミングベルト
| 研削ネジ: | 研削ネジは、高い精度で研削加工された雄ネジとそれを受けるメネジから構成されています。雄ネジとメネジは、お互いに広い面積にわたり接触するため摩擦が大きくなりますが、一回転あたりの送り量を細かくでき分解能を高めることができます。 |
| ボールネジ: | ボールネジは、ネジ軸とナットの間にボールを挟み込んだ構造をしています。ネジを回転させると、ボールがネジ軸とナットの間を転がりながら移動し、再びもとの場所に戻るように設計されています。ボールの転がりを利用するため、摩擦が小さく高い伝達効率が得られ、静摩擦と動摩擦の差が小さくスティックスリップが起こりにくくなります。 |
●ボールネジ+クサビ
| クサビは縦横の比が1:2タイプと、1:4タイプがあり、押し込み量の1/2、1/4が上下動の移動量となります。 |
分解能
| ステージの分解能は、以下の計算から求められます |
ΔX =( p・Δθ / 360n・m) |
| ※ 弊社では、基本ステップ角0.36°/pulseと0.72°/pulseの2種類のモータを使用し、送りネジやタイミングベルト、クサビを組み合わせています。 |
最高速度
| 最高速度は、高速域でのモータとドライバのトルク特性に依存しますが、弊社ではドライバをハーフステップに設定し、10kppsで動作させたときの速度として定義しています。10kpps以外の場合は、各仕様欄へ記載してあります。 |
●ステージの落下について
| 送り方式にボールネジを利用した自動Zステージは、モータの励磁をオフにするとステージ上面が落下する可能性があります。オプション対応として、そのような場合の落下を防ぐための電磁ブレーキを装着することが可能です。詳しくは営業部までお問い合わせ下さい。 |
勝手違い(逆勝手)
| ご要望に応じてコネクタとセンサを左右反転して取り付ける、逆勝手仕様に対応いたします。 ※対応機種の内、ZA07A-W2CとZA10A-W2C以外はコネクタ部のみの逆勝手仕様となります。 |