自動スイベル(ゴニオ)ステージガイダンス
スペック表の見方
 |
| SA07A-RT02 |
| スペック表 | 説明 Description | ||
| 型式 | SA07A-RT02 | ① 型式の名称です。 | |
| 勝手違い型式 | SA07A-RT02-R | ② 型式①に対する逆勝手仕様の型式です。 | |
| テーブル面 | 70mm×70mm | ③ ステージ上面の大きさです。 | |
| 案内方式 | 精密クロスローラガイド | ④ ステージの案内方式を示します。 | |
| 回転範囲 | ±10° | ⑤ 中心点を基準としてプラス、マイナスで表示します。 | |
| 送り方式 | ウォーム&ウォームホイール | ⑥ ステージの送り方式です。 | |
| 分解能 | フル/ハーフ ステップ | 0.00153°/0.000765° | ⑦ マイクロステップ分割数の違いによる、ステージの各分解能です。 |
| マイクロステップ(1/20分割) | 0.0000765° | ||
| 最高速度 | 7.65°/sec | ⑧ ステージが動作できる最高速度(ハーフステップ、10kpps時)です。 | |
| ワークディスタンス | 70mm±0.2mm | ⑨ ステージ上面とステージの回転中心との距離です。 | |
| 回転中心変位量 | Φ0.05mm/±10° | ⑩ 移動範囲内での回転中心位置のズレ量です。 | |
| ロストモーション | ≦0.003° | ⑪ 検査方法を参照して下さい。 | |
| バックラッシュ | ≦0.001° | ⑫ 検査方法を参照して下さい。 | |
| モーメント荷重 | 0.09 arcsec/N・cm | ⑬ ステージがモーメント荷重を受けた時の傾斜角度です。 | |
| 水平耐荷重 | 49N(5kgf) | ⑭ ステージ中央での搭載可能重量です。 | |
| 材質 | アルミ合金 | ⑮ 主に使用されている材料を示します。 | |
| 外観 | 白色仕上げ | ⑯ 外観の色や表面処理を示します。 | |
| 自重Weight | 0.95kg | ⑰ 製品の重量です。 | |
| 直交度 | − | ⑱ 2軸組合せステージの直交度を示します。 | |
| モータ | 5相ステッピングモータ(オリエンタルモーター: PK544PMB)定格電流 0.75A/相,基本ステップ角 0.36° | ⑲ 使用されているアクチュエータの型式を示します。 | |
| コネクタ | 丸形20ピン(ヒロセ: RP13A-12RA-20PC) | ⑳ ステージに使用されているコネクタの形状とピン数です。 | |
| ステージ結線タイプ | V3 | ステージとステッピングモータ及び、フォトセンサとの結線形式です。 | |
| 価格 | ¥149,000 | 標準製品の価格を示します。 | |
| オーバーホール費 ※ | ¥36,000 〜 | オーバーホールの費用を示します。 | |
| クリーングリス交換費 | ¥24,000 | クリーングリスへの交換費用を示します。 | |
| 真空グリス交換費 | ¥24,000 | 真空グリスへの交換費用を示します。 | |
| 同形モータ交換費 | ¥12,000 〜 | 標準モータと取り付けサイズが同等のモータへの交換費用を示します。 | |
| 異形モータ交換費 | ¥30,000 〜 | 標準モータと取り付けサイズが異なるモータへの交換費用を示します。 | |
※ オーバーホール費に部品代は含まれません。
案内方式
●クロスローラガイド
| クロスローラガイドとは、90°のV溝を持つローラレースと円筒コロからなる案内方式です(図-1参照)。ローラレースの摺動面は焼入れ研磨仕上げにより平面度の精度が高く硬質に仕上げられています。円筒コロはこの2本のローラレースに挟まれた空間に互い違いに配置されています。ステージが駆動する際には、ローラレース上を複数の円筒コロが転がるため、停止時から起動時への摩擦の変化(静止摩擦と動摩擦の差)が小さく、作動すべりが起こりにくくなっています。また、クロスローラガイドは、線接触で荷重を支えるため、ボールガイド機構よりも剛性が高くなっています。このクロスローラガイドは、独自に設計された剛性が強く精度の高いものを使用し、ローラレースと円筒コロ間の与圧を精密に管理して高剛性を維持しています。 | 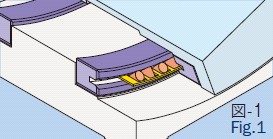 |
送り方式
●ウォームとウォームホイール
| ウォームとウォームホイールの噛みあわせによって強い力を生み出すことが出来ます。結果として減速駆動となりますが、その分精密な送り方式となります。 | 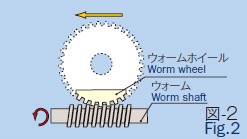 |
●ボールネジ
| ボールネジは、ネジ軸とナットの間にボールを挟み込んだ構造をしています(図-3)。ネジを回転させると、ボールがネジ軸とナットの間を転がりながら移動し、再びもとの場所に戻るように設計されています。ボールの転がりを利用するため、摩擦が小さく高い伝達効率が得られ、静摩擦と動摩擦の差が小さくスティックスリップが起こりにくくなります。 | 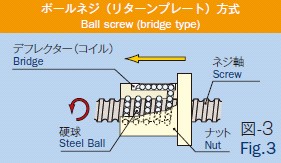 |
ボールネジの特徴
| ●高耐久性 ボールネジ駆動により耐久性に優れています。 ● 小型化、軽量化 ボールネジは動力の伝達効率が高いので小型モータを採用しコンパクト化が可能となります。 <ボールネジスイベル取付の際の注意> 設計上可動域が5度程度なのでコントローラで駆動させるとリミットセンサが感知し取付穴が出てきません。手動にてモーター軸を回転させ取付穴を出し固定して下さい。 再度駆動させる際には必ず、手動にて原点付近(リミットの内側、可動域)に戻してから電源を入れて下さい。 |
移動量
●ウォーム&ウォームホイール
| ウォームホイールに直結したモータを回転させることにより傾斜角度を調整します。傾斜角度とモータの回転量との間には以下のような関係が成り立ちます。 |
Δθs = Δθ / n・m |
| 型式 | 減速比(n) | モータの基本ステップ角(°/pulse) |
| SA04B-RT02 | 268 | 0.36 |
| SA04B-RM02 | 364 | 0.36 |
| SA05B-RT02 | 232 | 0.36 |
| SA05B-RM02 | 300 | 0.36 |
| SA05B-RB02 | 372 | 0.36 |
| SA07A-RT02 | 235 | 0.36 |
| SA07A-RM02 | 300 | 0.36 |
| SA07A-RB02 | 375 | 0.36 |
| SA10A-RT01 | 320 | 0.72 |
| SA10A-RM01 | 428 | 0.72 |
| SA10A-RB01 | 536 | 0.72 |
| SA13A-RT01 | 288 | 0.72 |
| SA13A-RM01 | 400 | 0.72 |
| SA16A-RT01 | 510 | 0.72 |
| SA16A-RM01 | 600 | 0.72 |
最高速度
| 最高速度は、高速域でのモータとドライバのトルク特性に依存しますが、弊社ではドライバをハーフステップに設定し、10kppsで動作させたときの速度として定義しています。 10kpps以外の場合は、各仕様欄へ記載してあります。 |
●ボールネジ
| 直線運動を回転運動に変換している為、ステージ位置によって最小分解能が異なります。 |
・ 分解能 |
| 型式 | Δθ | P | R |
| SA05A-R2T01 | 0.72 | 1 | 53.9 |
| SA05A-R2M01 | 0.72 | 1 | 71.9 |
| SA05A-R2B01 | 0.72 | 1 | 89.9 |
| SA05A-R2G01 | 0.72 | 1 | 107.9 |
| SA07A-R2T01 | 0.36 | 1 | 75.75 |
| SA07A-R2M01 | 0.36 | 1 | 101.75 |
| SA07A-R2B01 | 0.36 | 1 | 127.75 |
| SA10A-R2T01 | 0.36 | 1 | 101.375 |
| SA10A-R2M01 | 0.36 | 1 | 139.375 |
| SA10A-R2B01 | 0.36 | 1 | 177.375 |
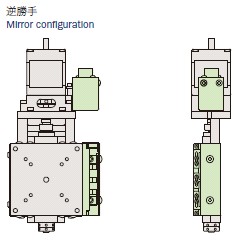
勝手違い(逆勝手)
| ご要望に応じてコネクタとセンサを左右反転して取り付ける、逆勝手仕様に無償で対応いたします。また、2軸の組合せステージにも標準ステージと逆勝手ステージの組合せに対応いたします。 |
 |
 |
●2軸組勝手一覧
型式の後ろに-***が追加されます。
 |
 |
 |
 |
 |
 |
 |
 |